Im Initialisierungsprojekt "E-City Buddy" des Verbundes "Profilregion Mobilitätssysteme Karlsruhe" werden ausgewählte Kompetenzen des Lehrstuhls für Fahrzeugtechnik und einzelner Verbundpartner an einem (teil-) autonom fahrenden Konzept eines transport- und mobilitätsunterstützenden Stadtfahrzeugs demonstriert.
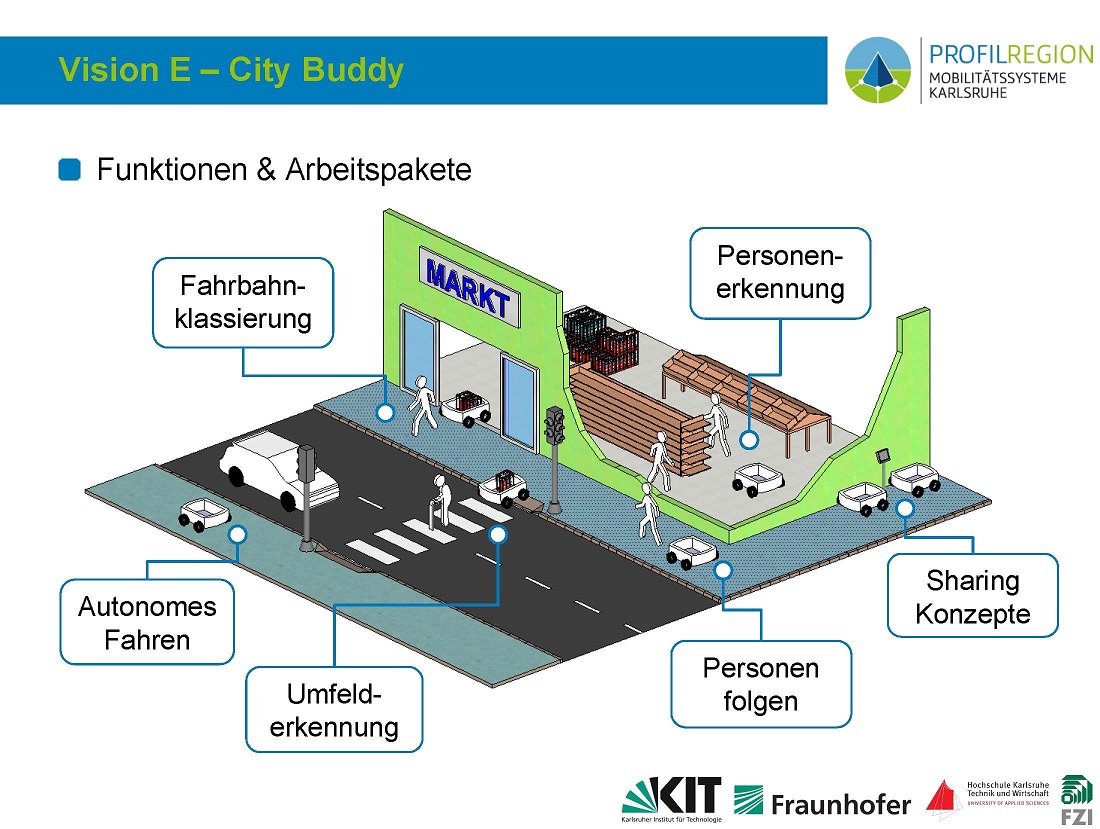
Realisierung autonome Fahrt mittels "Tentakel Methode" (Trajektorienplanung):
Fahrzeug folgt Person (rot) und umfährt dabei Hindernisse (schwarz)