Brake Compensator - Development of a differential speed-controlled all-wheel braking system for slope equipment carriers with variable steering modes
- Contact:
- Funding:
ZIM - Central Innovation Program for Small and Medium-Sized Enterprises, Federal Ministry for Economic Affairs and Energy
- Partner:
- Startdate:
01.09.2020
- Enddate:
31.08.2022
Motivation
The safe and precise movement of mobile machines on rough terrain poses a major challenge—especially when braking on steep slopes. Conventional braking systems often lead to uncontrolled slipping and considerable damage to the ground. This problem gave rise to the idea of developing an innovative braking system that adjusts the braking force individually to each wheel, thereby significantly increasing driving stability and safety.

Project Content
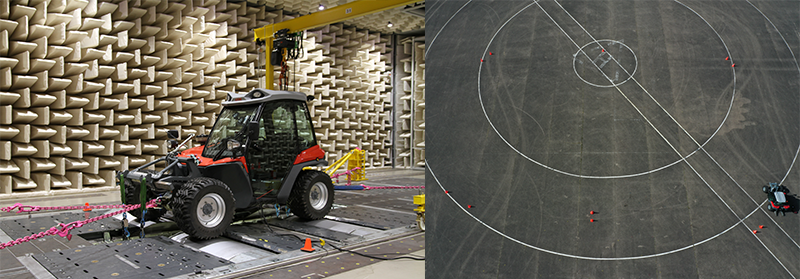
The content of this project is the investigation of a drive and braking system that decelerates the wheels individually in thrust mode based on the position of the vehicle and the individual wheel path. The added value is to be found in slip minimization, reduced ground damage, and an increase in off-road capability, driving safety, and handling characteristics. Overall, the aim is to achieve a significant improvement in performance compared to current systems. In addition to simulation studies, a test vehicle will be built for testing both in a test bench environment and in the field.
The test vehicle showed a significant improvement in off-road capability, driving safety, and directional stability compared to conventional slope equipment carriers. The technology offers great potential for industrialization and use in other vehicle types.