
Aktuelles 2023
Auftaktveranstaltung im "Projekt Tyre Road Noise"

Den Straßenverkehr nehmen die deutschen Bürgerinnen und Bürger laut Umweltbundesamt als größte Lärmquelle wahr: 76 Prozent fühlen sich durch ihn gestört oder belästigt. Zum Schutz der Bevölkerung regeln EU-Richtlinien die Grenzwerte für Lärmemissionen, die schrittweise weiter verschärft werden. Um die neuen Grenzwerte auch unter realen Verkehrsbedingungen einhalten zu können, erschließt das Institut für Fahrzeugsystemtechnik (FAST) zusammen mit Partnern aus Industrie, Verwaltung und Wissenschaft im "Projekt Tyre Road Noise" Maßnahmen, um Reifen-Fahrbahn-Geräusch-Emissionen zu mindern. Dafür entwickeln sie ein datenbasiertes Berechnungsmodell für das Vorbeifahrtgeräusch von Fahrzeugen mithilfe von Methoden der Künstlichen Intelligenz (KI). Zum Auftakt übergab am 18. Dezember 2023 Michael Theurer, Parlamentarischer Staatssekretär beim Bundesminister für Verkehr und Digitales, die Förderurkunden an das Konsortium. Mehr hierzu unter Link.
Promotionsprüfung Nicolas Fraikin
04.12.2023: Der Institutsteil Fahrzeugtechnik gratuliert Nicolas Fraikin M. Sc. zu seiner bestandenen Promotionsprüfung!

Projekt "MobileCityGame" gewinnt den Deutschen Mobilitätspreis 2023
Am 30.11.2023 hat das Projekt MobileCityGame mit Beteiligung des FAST den Deutschen Mobilitätspreis 2023 in der Kategorie DMP Digital Transformation & Data Driven Mobility gewonnen! Der innovative Ansatz, komplexe Verkehrs- und Verhaltensmodelle aus der Forschung in einer App zugänglich für alle zu machen, hat die Jury, den Bundesverkehrsminister Volker Wissing und auch viele der weiteren Gäste und Kandidaten in Berlin überzeugt! Mit der MobileCity-App wurde ein einzigartiger Simulator für die Planung von nachhaltigen Mobilitätssystemen in Städten entwickelt. Die App macht die Verkehrswende, die zur Erreichung der Klimaziele nötig ist, spielerisch für jede und jeden verständlich und erlebbar. Sie demokratisiert damit Planungsprozesse der öffentlichen Hand.
SpielerInnen gestalten als EntscheiderInnen die Umsetzung der kommunalen Mobilitätswende, in dem sie die städtische Mobilität über reale Maßnahmen aus Verkehrsentwicklungsplänen voranbringen. Mit der MobileCity-App habt ihr das notwendige Werkzeug zur Analyse der Auswirkung und Effektivität realer städteplanerischer Maßnahmen buchstäblich in der eigenen Hand. Hier kann man selbst Maßnahmen entscheiden und anschließend erleben, wie sich ein neuer Radschnellweg oder Stadtbahntunnel über neue Wegezeiten und Komfort auf das Mobilitätsverhalten, resultierende Emissionen, die Lebensqualität und auch Finanzen der Modellstadt auswirken. Die Zusammenhänge lassen sich über detaillierte Graphen und Daten nachverfolgen und in alternativen Spieldurchläufen vergleichen.
Die App ist kostenlos und spielbar für iOS und Android in den App-Stores verfügbar. Probiert sie doch aus und gebt uns euer Feedback! Mehr Infos und Kontaktdaten zur Projektleitung findet ihr unter Link.
Das Lob der Jury gilt dem ganzen Team hinter dem Projekt. Neben uns als Institut für Fahrzeugsystemtechnik (FAST) waren folgende Partner im Projekt beteiligt: Institut für Verkehrswesen (IfV) am KIT, Institut für Volkswirtschaftslehre (ECON) am KIT, Institut für Produktentwicklung (IPEK) am KIT, Fraunhofer-Institut für System- und Innovationsforschung (ISI), Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung (IOSB) sowie die takomat GmbH. Wir danken für drei großartige Jahre Projektarbeit, die nun mit dem DMP durch das Bundesministerium für Digitales und Verkehr anerkannt wurden. Zudem gilt Dank dem Bundesministerium für Bildung und Forschung, die das Projekt gefördert haben, dem Projektträger DLR, der stets unterstützenden Stadt Karlsruhe sowie der Jury und den Organisatoren des DMP2023.
Promotionsprüfung Jan Löwer M. Sc.
29.11.2023: Der Institutsteil Fahrzeugtechnik gratuliert Jan Löwer M. Sc. zu seiner bestandenen Promotionsprüfung!

Projektabschluss Verbundprojekt "KIsSME"
Am 28.11.2023 konnten wir gemeinsam mit unseren Partnern auf dem Bosch Forschungscampus in Renningen die Ergebnisse aus drei Jahren intensiver Forschungsarbeiten bei der Abschlusspräsentation zum Projekt "Künstliche Intelligenz zur selektiven echtzeitnahen Aufnahme von Szenarien- und Manöverdaten bei der Erprobung von hochautomatisierten Fahrzeugen" kurz "KIsSME" vorstellen.
Das Verbundprojekt wurde vom Bundesministerium für Wirtschaft und Klimaschutz mit Unterstützung der Europäischen Union gefördert und hatte eine Laufzeit von drei Jahren. Beteiligt waren die KMUs RA Consulting GmbH, Mindmotiv GmbH und LiangDao GmbH sowie die Wissenschaftspartner Fraunhofer-Institut für Kurzzeitdynamik, Ernst-Mach-Institut (EMI), FZI Forschungszentrum Informatik und die Forschungsgruppe Automatisierung des Instituts für Fahrzeugsystemtechnik am Karlsruher Institut für Technologie. Die Koordination des Konsortiums übernahm die AVL Deutschland GmbH..
Gemeinsam haben wir uns mit einem bei der Entwicklung von automatisierten Fahrzeugen zentral relevanten Thema beschäftigt: Um automatisierte Fahrzeuge zu entwickeln, müssen in jeder Phase Testfahrten durchgeführt werden. Während dieser Tests erfassen zahlreiche Sensoren Informationen über die Umgebung und den Zustand des Fahrzeugs. Mit diesen Daten sollen unter anderem Manövrieralgorithmen trainiert werden, um im autonomen Mischverkehr noch besser auf komplexe Verkehrssituationen reagieren zu können. Dabei werden enorme Datenmengen - mehrere Gigabyte pro Sekunde - gespeichert.
Um diese Datenmenge zu reduzieren und nur relevante Daten zu speichern wurde im Projekt an einer KI-basierten intelligenten Erkennung kritischer Verkehrssituationen gearbeitet. Dazu wurde ein Software-Prototyp entwickelt, der nur die Daten von relevanten und kritischen Verkehrssituationen speichert, die einen Mehrwert für den weiteren Entwicklungsprozess darstellen. Mit Hilfe von KI-basierten Algorithmen wertet das System jede Verkehrssituation in Echtzeit vollständig aus und entscheidet, ob und wenn ja, welche Informationen darüber gespeichert werden sollen. Eine weitere Besonderheit: Der Prototyp lässt sich flexibel an die Bedürfnisse der Entwickler anpassen. So können bei Testfahrten in den verschiedenen Entwicklungsstadien die richtigen Daten erfasst werden.
20. VDI-Fachtagung "Reifen - Fahrwerk - Fahrbahn"
Am 8. und 9. November 2023 fand in den Räumen des Karlsruher ACHAT-Hotels die 20. VDI-Fachtagung „Reifen - Fahrwerk - Fahrbahn“ statt. Die Vorträge zeigten den rund 120 Teilnehmern eine wissenschaftliche Breite von neuesten Simulationsmethoden, Erkenntnissen zum Reifenabrieb, neuen Fahrwerkssystemen bis hin zu intelligenten Fahrzeugen/Straßen mit Zustandserfassung. Timon Schlögl stellte unter dem Titel "Schätzung des Fahrbahnzustands mit Hilfe KI-basierter Auswertung von LiDAR-Sensoren" vielversprechende Ergebnisse seiner bisherigen Forschungen dar. Stefan Schläfle konnte mit seinem Vortrag "Experimentelle Untersuchung der Reifen-Fahrbahn-Feinstaubemission von Premium-Sommerreifen am Innentrommelprüfstand" sowie in der angeregten Diskussion überzeugen und hat hierfür den Best Paper Award erhalten.

|
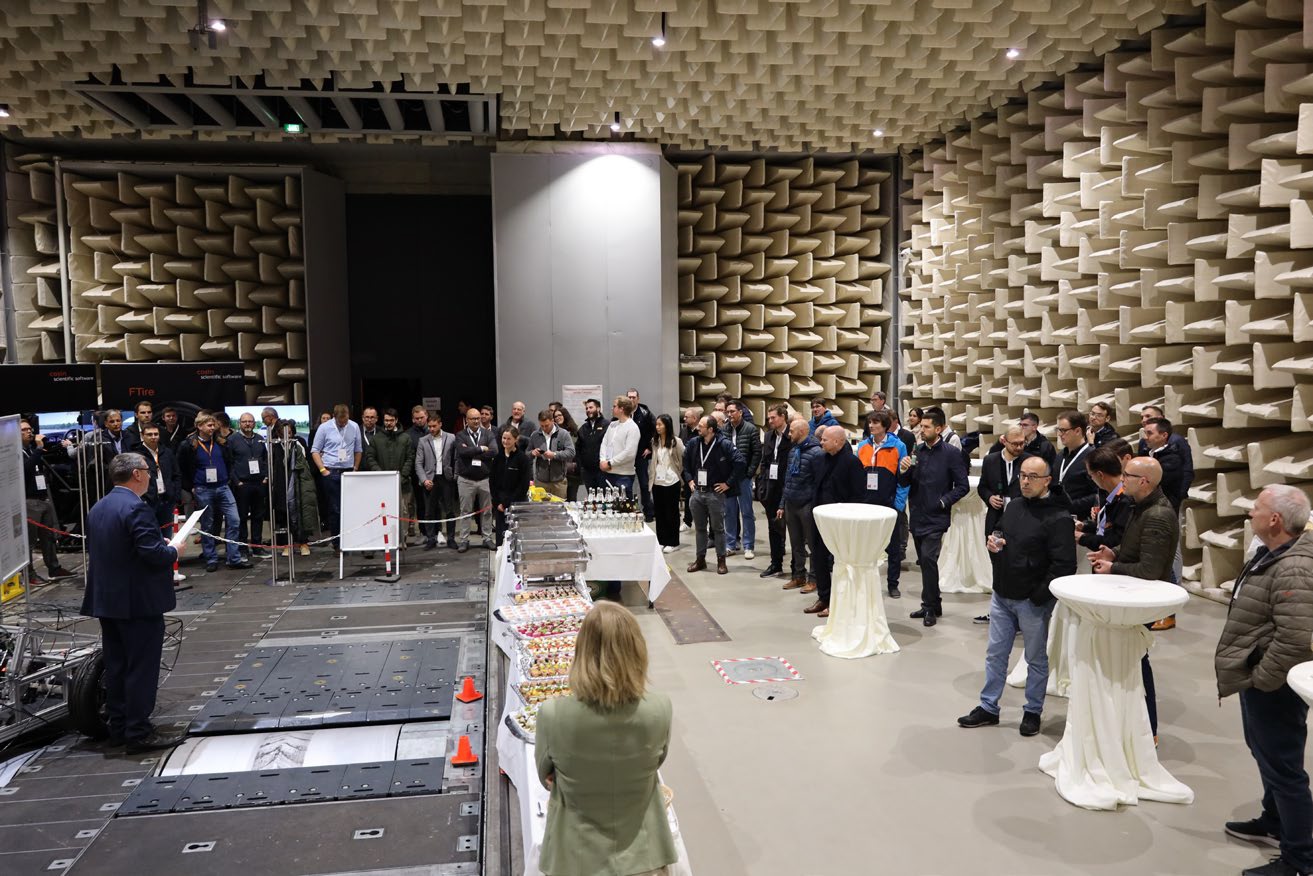
Am Abend des ersten Tages fand die abendliche Vernetzungsveranstaltung in unseren Laborräumen statt. Während die Laborhalle Akustik-Allrad-Rollenprüfstand für einen Stehimbiss und umfangreiche Gespräche genutzt wurde, konnten sich die Tagungsteilnehmer in unseren Laboren sowie auf der Fahrfläche über unsere Ausrüstung sowie unsere Forschungsarbeiten informieren. Dabei wurde unter anderem gezeigt, wie reale Fahrszenarien mithilfe von CarMaker, dem ViL und einem Gesamtfahrzeug im Labor untersucht werden können. Mit Hilfe von TruckMaker wurde am GRIPS in Kombination mit der Fahrdynamik-Simulation demonstriert, wie reale Fahrsituationen an einem Reifenprüfstand zugänglich gemacht werden. Weitere Mitmach-/Mitfahr-Angebote von IPG automotive, MdynamiX, Cosin, Volkswagen und dem DLR Institut für Fahrzeugkonzepte rundeten das spannende Programm ab.
Offizieller Kick-off-Termin zu RegioKArgoTramTrain
Das Leuchtturmprojekt „Nachhaltige Logistik- und Personenmobilität mittels KArgoTramTrains (RegioKArgoTramTrain)“ nimmt Fahrt auf: Bei der Albtal-Verkehrs-Gesellschaft (AVG) in Karlsruhe fand am 09.10.2023 der offizielle Kick-off-Termin zu dem auf vier Jahre angelegten Forschungsprojekt statt.

Ziel des Projekts, das von der AVG federführend geleitet wird, ist es, den kombinierten Personen- und Warentransport in Straßenbahnwagen mit automatisiertem Be- und Entladen weiterzuentwickeln und in einem Reallabor zu demonstrieren. Für das optimale Be- und Entladen des Fahrzeugs soll eine KI-basierte Technologie im Schienenfahrzeug eingerichtet werden. Des Weiteren wird im Rahmen des Gesamtprojekts ein spezielles Logistikkonzept entwickelt, um einen langfristigen und wirtschaftlichen Betrieb einer „RegioKArgoTramTrain“ innerhalb von Städten und deren Umland abzubilden.
Am Projekt sind folgende Partner beteiligt: Automotive Engineering Network e.V. (aen e.V.), Forschungszentrum Informatik (FZI), Hochschule Furtwangen (HFU),Hochschule Karlsruhe – Technik und Wirtschaft (HKA), INIT Innovative Informatikanwendungen in Transport-, Verkehrs- und Leitsystemen GbmbH (INIT), INOVAPLAN GmbH, Karlsruher Institut für Technologie (KIT), MARLO Consultants GmbH, Rheinland-Pfälzische Technische Universität Kaiserslautern-Landau (RPTU), SEW-Eurodrive GmbH & Co KG, SimPlan AG, TechnologieRegion Karlsruhe GmbH (TRK) und die TransportTechnologie-Consult GmbH (TTK).
Das Karlsruher Institut für Technologie ist mit dem Institut für Fahrzeugsystemtechnik (FAST) und dem Institut für Verkehrswesen (IfV) am Projekt beteiligt. Die benannten Partner haben im Vorfeld als Bietergemeinschaft im Rahmen eines europaweiten Vergabeverfahrens den Zuschlag erhalten.
Leuchtturmprojekt des Wettbewerbs RegioWIN
Das Projekt „RegioKArgoTramTrain“ wurde 2021 im Rahmen des Landeswettbewerbs „RegioWIN 2030 – Regionale Wettbewerbsfähigkeit durch Innovation und Nachhaltigkeit“ als eines von landesweit 24 Leuchtturmprojekten prämiert. Der Wettbewerb ist ein zentraler Baustein im Rahmen der Förderung aus dem Europäischen Fonds für regionale Entwicklung (EFRE) in Baden-Württemberg in der Förderperiode 2021-2027. Drei der 24 prämierten Leuchtturmprojekte sind Wettbewerbsbeiträge der TechnologieRegion Karlsruhe (TRK).
Um regionale Strukturförderung zu betreiben, erhält Baden-Württemberg in der Förderperiode 2021-2027 rund 279 Millionen Euro von der Europäischen Union aus dem EFRE. Das EFRE-Programm Baden Württemberg 2021-2027 ist an der Innovationsstrategie Baden-Württemberg ausgerichtet und unterstützt die Schwerpunkte Zukunftstechnologien und Kompetenzen sowie Ressourcen- und Klimaschutz. RegioWIN 2030 zielt darauf ab, die Wettbewerbsfähigkeit in den Regionen durch Innovation und Nachhaltigkeit zu verbessern und damit zu einer zukunftsfähigen Regionalentwicklung beizutragen. Regionen, Landkreise, Städte und Gemeinden waren aufgefordert, entsprechende Wettbewerbsregionen zu formieren und zusammen mit Akteuren aus Wirtschaft, Wissenschaft, der Gesellschaft und Verwaltung Stärken und Schwächen ihrer Wettbewerbsregion in eine Strategie zu überführen. Ausgehend von dieser Strategie wurden sogenannte Leuchtturmprojekte entwickelt, die von der Landesregierung am 14. April 2021 prämiert wurden. Dies wiederum war Voraussetzung für eine Vollantragstellung.
Promotionsprüfung Julien Pinay M. Sc.
06.10.2023: Der Institutsteil Fahrzeugtechnik gratuliert Julien Pinay M. Sc. zu seiner bestandenen Promotionsprüfung!

Promotionsprüfung Matthias Vollat M. Sc.
28.09.2023: Der Institutsteil Fahrzeugtechnik gratuliert Matthias Vollat M. Sc. zu seiner bestandenen Promotionsprüfung!

Projektabschluss Verbundprojekt "SafeADArchitect"
Nach drei Jahren herausfordernder Forschungsarbeiten fand am 21.09.2023 am KIT Campus Ost die erfolgreiche Abschlusspräsentation zum Projekt „Entwicklung einer risikosensitiven Gesamtsystemarchitektur und echtzeitfähiger Methoden zur Absicherung von Automatisierten Fahrzeugen (SafeADArchitect)“ statt. Die beteiligten Partner Intel Deutschland GmbH, ANavS GmbH, Lake Fusion Technologies GmbH, Schaeffler Technologies AG & Co. KG (SHARE am KIT) und FZI Forschungszentrum Informatik präsentierten gemeinsam mit dem Institut für Fahrzeugsystemtechnik die Ergebnisse sowie das aufgebaute Demonstratorfahrzeug. Anhand diverser Fahrvorführungen konnte am KIT Campus Ost eindrucksvoll dargestellt werden, welche Verbesserungen beim Fahrzeugverhalten durch die risikobasierten Ansätze zur Verhaltensplanung erreicht wurden. Insgesamt werden die Ergebnisse von „SafeADArchitect“ entscheidend dazu beitragen, die Schaffung von Sicherheitsrahmen für zukünftige autonome Fahrzeuge zu ermöglichen bzw. zu vereinfachen.

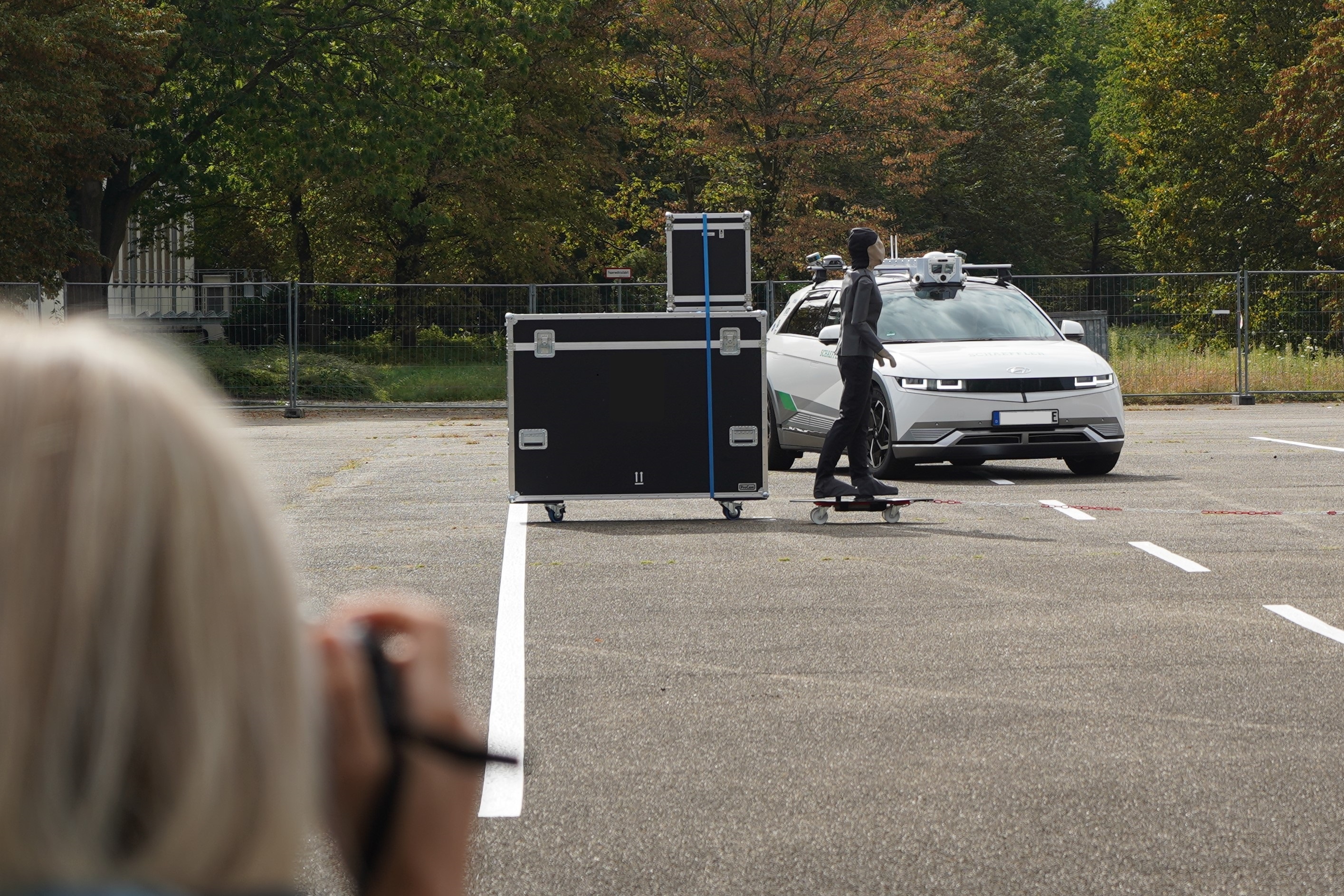
Reaktion auf Fußgänger, der aus Verdeckung kommt |
Veröffentlichung des FAST zur Titelstory des Journals gewählt
08.09.2023: Das Paper „Influence of Load Condition, Tire Type, and Ambient Temperature on the Emission of Tire-Road Particulate Matter” wurde zur Titelstory des veröffentlichenden Journals Atmosphere gewählt. Das Paper beschreibt den Aufbau der Prüfeinrichtungen sowieso die Vorgehensweise zur Messung von Reifen-Fahrbahn-Feinstaub am institutseigenen Innentrommelprüfstand. Dort wurden Sommer-, Allwetter- und Winterreifen auf realen Fahrbahnoberflächen in verschiedene Lastzustände versetzt, um das Emissionsverhalten der unterschiedlichen Reifentypen unter verschiedensten Last- und Umgebungsbedingungen zu testen.

Promotionsprüfung Adrian Strigel M. Sc.
25.07.2023: Der Institutsteil Fahrzeugtechnik gratuliert Adrian Strigel M. Sc. zu seiner bestandenen Promotionsprüfung!

Promotionsprüfung Philipp Kautzmann M. Sc.
14.07.2023: Der Institutsteil Fahrzeugtechnik gratuliert Philipp Kautzmann M. Sc. zu seiner bestandenen Promotionsprüfung!

 Start für Teilprojekt "Datenplattformen" der KI-Allianz BW
Start für Teilprojekt "Datenplattformen" der KI-Allianz BW
Am 20.07.2023 wurden von Dr. Nicole Hoffmeister-Kraut (Ministerin für Wirtschaft, Arbeit und Tourismus in Baden-Württemberg) der Förderbescheid für das Teilprojekt "Datenplattformen" der KI-Allianz Baden-Württemberg übergeben. Das KIT übernimmt darin unter anderem die Leitung für den Aufbau der Datenplattform für Mobilitätsdaten. Der Institutsteil Fahrzeugtechnik beteiligt sich hierbei mit der Generierung syntethischer und realer Datensätze zur Entwicklung der Datenplattform. Weitere Informationen finden sich in der Pressemitteilung des Wirtschaftsministeriums Baden-Württemberg.

Promotionsprüfung Jens Jauch M.Sc.
11.07.2023: Der Institutsteil Fahrzeugtechnik gratuliert Jens Jauch M. Sc. zu seiner bestandenen Promotionsprüfung!

Präsidium des KIT testet eTrailer aus LogIKTram
Am 26.06.2023 haben sich das Präsidium sowie einige Bereichsleiter des Karlsruher Instituts für Technologie an der Aktion „Stadtradeln 2023“ beteiligt. Dabei hat die Gruppe, mit dem Fahrrad vom Campus Süd kommend, einen Stopp am Campus Ost des KIT eingelegt. Hier konnten die Teilnehmenden die Chance ergreifen, selbst eine Runde mit dem sogenannten eTrailer aus dem Forschungsprojekt LogIKTram zu drehen. Dieser elektrisch unterstütze Fahrradanhänger der Nüwiel GmbH aus Hamburg stellt eine mögliche Lösung für einen zukünftigen Gütertransport dar. Dabei soll der eTrailer in einer Straßenbahn in das Zustellgebiet gebracht werden, wo er von einem Fahrradkurier zur Auslieferung übernommen wird. Nach den Testfahrten waren nur begeisterte und zufriedene Gesichter zu sehen.



UITP Global Public Transport Summit in Barcelona
.jpg)
Vom 4. bis zum 7. Juni 2023 fand in Barcelona der UITP Global Public Transport Summit statt. Diese Veranstaltung ist der weltweit führende Treffpunkt für Fachleute des öffentlichen Nahverkehrs, um Ideen auszutauschen, Innovationen voranzutreiben und wichtige Kontakte zu knüpfen.
Als Beitrag des KAMO: Karlsruhe Mobility Leistungszentrum / Profilregion zum Karlsruhe Mobility Lab der Technologieregion Karlsruhe konnten wir vielen interessierten Besuchern vorstellen, welche Möglichkeiten für die optimierte Auslastung von vorhandener Verkehrsinfrastruktur im Rahmen des Verbundprojekts LogIKTram erforscht wurden. Der auf Basis des eTrailers der Hamburger Nüwiel GmbH aufgebaute Demonstrator erwies sich dabei als Publikumsmagnet und zeigte auf, wie eine mögliche Kombination aus Passagier- und Frachttransport aussehen kann.