
Vehicle-in-the-Loop Gesamtfahrzeugprüfstand
Gesamtfahrzeugprüfstand für dynamische Lastsimulationen bei Geradeaus- und Kurvenfahrt
Ansprechpartner: Philip Rautenberg
Michael Frey
Kontakt: vil∂fast.kit.edu

Am Institutsteil Fahrzeugtechnik können Pkw und Lkw (2WD oder 4WD) auf dem lenkbaren Vehicle-in-the-Loop Gesamtfahrzeugprüfstand (kurz: ViL) getestet werden. Der ViL-Prüfstand verwendet eine Fahrdynamiksimulation für die realistische Simulation der Fahrzeugumgebung. Durch die geringe Trägheit und die leistungsstarken elektrischen Lastmaschinen wird ein direktes und dynamisches Ansprechen der Fahrwiderstandssimulation erreicht. Dieser Aufbau ermöglicht Leistungs-, Energie- und Verbrauchsuntersuchungen von Fahrzeugen bei kombinierter Geradeaus- und Kurvenfahrt sowie die Analyse von dynamischen Regeleingriffen von Fahrerassistenzsystemen (ADAS) bei unterschiedlichen Reibwertniveaus (trocken, nass, Schnee). Eine erhöhte Genauigkeit und Reproduzierbarkeit wird durch den Einsatz und die Kombination eines Pedal- und eines Lenkroboters erreicht, die Tests ohne menschliche Fahrer und deren Einflüsse ermöglichen.
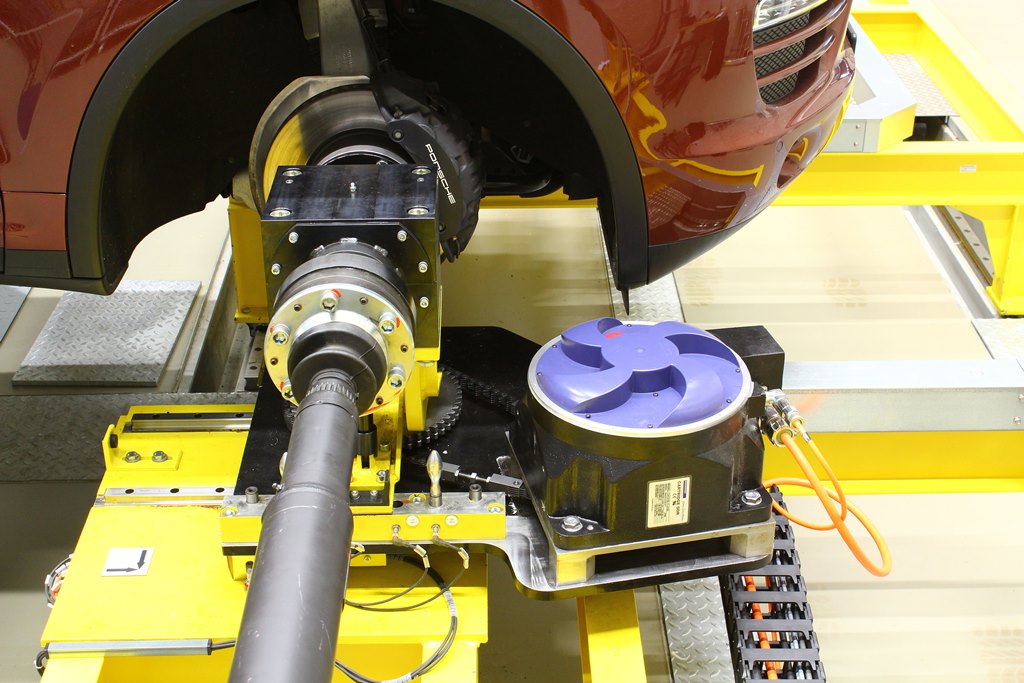
Der ViL-Prüfstand besteht aus vier Lastmaschinen (1) zur Simulation der Fahrwiderstände an den Radnaben des Fahrzeugs. Die Lastmaschinen werden durch am KIT entwickelte hochdynamische Frequenzumrichter betrieben. Als Besonderheit verfügt der Prüfstand über zwei Rückstellmomentsimulatoren (2) an den lenkbaren Vorderrädern des Prüflings. Ein Fahrtwindgebläse (3) an der Vorderseite des Prüflings versorgt den Antriebsstrang des Prüflings mit ausreichend Kühlluft. Durch den Einsatz von homokinetischen Gleichlaufgelenkwellen und Drehmomentsensoren an der Radnabe können Geschwindigkeiten und Drehmomente präzise und verlustfrei geregelt werden.
Das Automatisierungssystem von OPVengineering ermöglicht eine schnelle Anpassung an individuelle Testfälle. In der Regel wird der Prüfstand drehzahl- oder drehmomentgeregelt betrieben. Dabei wird zwischen dem Modus der Drehzahl- oder Geschwindigkeitsregelung und dem Modus der Fahrwiderstandsregelung unterschieden. In beiden Modi können verschiedene manuelle oder vollautomatische (und individuell anpassbare) Prüfabläufe durchgeführt werden. Darüber hinaus ist auch die Software CarMaker TestBed von IPG Automotive in das Prüfstandsautomatisierungssystem integriert und kann beispielsweise für Test querdynamischer Fahrmanöver verwendet werden. Der Fahrroboter kann in allen Modi eingesetzt werden. Für einen menschlichen Fahrer steht ein Fahrerleitsystem vor dem Fahrzeug zur Verfügung. Der Datenaustausch zwischen dem Prüfling und dem ViL ist über verschiedene Schnittstellen möglich. Die Messdaten des Prüfstands liegen in verschiedenen Formaten vor (HDF5, MDF4, TDMS, CSV).
Optionen
- Fahrdynamiksimulation in CarMaker TestBed
- Sensorsimulation in CarMaker TestBed
- Pedalroboter (Eigenentwicklung)
- Lenkroboter (Stähle)
- Einbindung weiterer analoger oder digitaler Messtechnik
- Kommunikationsschnittstelle zum Prüfling
- Prüfstandsvernetzung (XiL-BW-e)
Technische Daten
Technical Data
| Max. Fahrzeuggewicht Max. vehicle weight |
12.000 kg |
| Max. Radlast Max. wheel load |
3.000 kg |
| Radstand Wheelbase |
1,8 - 4,9 m |
| Spurweite Track width |
1,2 - 3,9 m |
| Max. Drehzahl am Rad (1) Max. wheel speed |
2.000 min-1 (260 km/h bei rdyn ≈ 0,34m) |
| Max. Drehmoment am Rad (1) Max. wheel load torque |
2.500 Nm (@800 min-1) |
| Dauerleistung je Rad (1) Nom. wheel load power |
209 kW |
| Max. Lenkwinkel Vorderachs-Räder (2) Max. steering angle at the front wheels |
+/- 20° |
| Max. Gegenmoment beim Lenken am Rad (2) Max. steering load torque at the front wheels |
1.000 Nm |
| Max. simulierbarer Fahrtwind (3) Max. simulated airstream |
135 km/h |

Ansicht hinten

Ansicht vorne

Fahrerleitsystem

Fahrzeug mit Abgasabsaugung

Leitwarte

Pedal- und Lenkroboter
Radrückstellung
Beiträge zu Fachzeitschriften und Monografien, Berichte
Testing of ADAS Functions on a Steerable ViL Full Vehicle Test Bench
Rautenberg, P.; Piecha, P.; Frey, M.; Pfister, F.
2026. ATZ worldwide, 128 (5), 42–47. doi:10.1007/s38311-026-2186-1
Rautenberg, P.; Piecha, P.; Frey, M.; Pfister, F.
2026. ATZ worldwide, 128 (5), 42–47. doi:10.1007/s38311-026-2186-1
Erprobung von ADAS-Funktionen auf einem lenkbaren ViL-Gesamtfahrzeugprüfstand
Rautenberg, P.; Piecha, P.; Frey, M.; Pfister, F.
2026. ATZ - Automobiltechnische Zeitschrift, 128 (5), 42–47. doi:10.1007/s35148-026-2348-x
Rautenberg, P.; Piecha, P.; Frey, M.; Pfister, F.
2026. ATZ - Automobiltechnische Zeitschrift, 128 (5), 42–47. doi:10.1007/s35148-026-2348-x
A Generic Approach to Modeling Vehicle Pitch Dynamics on a Vehicle Test Bench
Kurz, C.; Stangenberg, L.; Gauterin, F.
2023. IEEE Open Journal of Vehicular Technology, 4, 739–748. doi:10.1109/OJVT.2023.3315317
Kurz, C.; Stangenberg, L.; Gauterin, F.
2023. IEEE Open Journal of Vehicular Technology, 4, 739–748. doi:10.1109/OJVT.2023.3315317
Driving Robot for Reproducible Testing: A Novel Combination of Pedal and Steering Robot on a Steerable Vehicle Test Bench
Rautenberg, P.; Kurz, C.; Gießler, M.; Gauterin, F.
2022. Vehicles, 4 (3), 727–743. doi:10.3390/vehicles4030041
Rautenberg, P.; Kurz, C.; Gießler, M.; Gauterin, F.
2022. Vehicles, 4 (3), 727–743. doi:10.3390/vehicles4030041
Radar Target Simulation for Vehicle-in-the-Loop Testing
Diewald, A.; Kurz, C.; Kannan, P. V.; Gießler, M.; Pauli, M.; Göttel, B.; Kayser, T.; Gauterin, F.; Zwick, T.
2021. Vehicles, 3 (2), 257–271. doi:10.3390/vehicles3020016
Diewald, A.; Kurz, C.; Kannan, P. V.; Gießler, M.; Pauli, M.; Göttel, B.; Kayser, T.; Gauterin, F.; Zwick, T.
2021. Vehicles, 3 (2), 257–271. doi:10.3390/vehicles3020016
Tagungsbeiträge
Method to Analyze Driving Dynamics during Faults in the Electric Drivetrain on a Vehicle-in-the-Loop Test Bench
Rautenberg, P.; Konzept, A.; Hitz, A.; Frey, M.; Reick, B.
2025. 17th International Conference on Engines and Vehicles for Sustainable Transport, Capri, I, September 14-17, 2025, 2025–24, SAE International. doi:10.4271/2025-24-0123
Rautenberg, P.; Konzept, A.; Hitz, A.; Frey, M.; Reick, B.
2025. 17th International Conference on Engines and Vehicles for Sustainable Transport, Capri, I, September 14-17, 2025, 2025–24, SAE International. doi:10.4271/2025-24-0123
Influence of MPC Based Driver Types on the Energy Consumption of Battery Electric Vehicles
Konzept, A.; Reick, B.; Miller, M.; Rautenberg, P.; Störzer, M.
2025. 17th International Conference on Engines and Vehicles for Sustainable Transport, Capri, I, September 14-17, 2025, 2025–24, SAE International. doi:10.4271/2025-24-0113
Konzept, A.; Reick, B.; Miller, M.; Rautenberg, P.; Störzer, M.
2025. 17th International Conference on Engines and Vehicles for Sustainable Transport, Capri, I, September 14-17, 2025, 2025–24, SAE International. doi:10.4271/2025-24-0113
Optimized Merging of the Virtual World and Reality on the Vehicle-in-the-Loop Test Bench
Piecha, P.; Rautenberg, P.; Friedmann, M.
2024, Oktober 9. 33. Aachen Colloquium Sustainable Mobility (2024), Aachen, Deutschland, 7.–9. Oktober 2024
Piecha, P.; Rautenberg, P.; Friedmann, M.
2024, Oktober 9. 33. Aachen Colloquium Sustainable Mobility (2024), Aachen, Deutschland, 7.–9. Oktober 2024
Battery Electric Vehicle-in-the-Loop Power and Efficiency Measurement Test Method
Rautenberg, P.; Reick, B.; Engelmann, D.; Frey, M.; Gauterin, F.
2023. 16th International Conference on Engines & Vehicles, Capri, Italy, 10-14 September 2023, 2023–24, SAE International. doi:10.4271/2023-24-0182
Rautenberg, P.; Reick, B.; Engelmann, D.; Frey, M.; Gauterin, F.
2023. 16th International Conference on Engines & Vehicles, Capri, Italy, 10-14 September 2023, 2023–24, SAE International. doi:10.4271/2023-24-0182
MeaSURe DriVe: Methods and Sensors to Understand and Regard Driver Attentiveness in Autonomous Vehicles
Knoch, E.-M.; Rautenberg, P.; Yüksel, K.; Knebel, R.
2022, September 21. IPG Automotive "Apply and Innovate" (2022), Karlsruhe, Deutschland, 20.–21. September 2022
Knoch, E.-M.; Rautenberg, P.; Yüksel, K.; Knebel, R.
2022, September 21. IPG Automotive "Apply and Innovate" (2022), Karlsruhe, Deutschland, 20.–21. September 2022
Driving and Steering Robot for Vehicle in the Loop Tests on a Steerable Vehicle Test Bench
Rautenberg, P.; Kurz, C.; Gießler, M.; Gauterin, F.
2021, Juni 15. wkm-Symposium (2021), Stuttgart, Deutschland, 15.–16. Juni 2021
Rautenberg, P.; Kurz, C.; Gießler, M.; Gauterin, F.
2021, Juni 15. wkm-Symposium (2021), Stuttgart, Deutschland, 15.–16. Juni 2021
Validating Reliability of Automated Driving Functions on a Steerable VEhicle-in-the-Loop (VEL) Test Bench
Han, C.; Seiffer, A.; Orf, S.; Hantschel, F.; Li, S.
2021. 21. Internationales Stuttgarter Symposium – Automobil- und Motorentechnik. Hrsg.: M. Bargende, 546–559, Springer Fachmedien Wiesbaden. doi:10.1007/978-3-658-33521-2_37
Han, C.; Seiffer, A.; Orf, S.; Hantschel, F.; Li, S.
2021. 21. Internationales Stuttgarter Symposium – Automobil- und Motorentechnik. Hrsg.: M. Bargende, 546–559, Springer Fachmedien Wiesbaden. doi:10.1007/978-3-658-33521-2_37
Consumption-relevant load simulation during cornering at the vehicle test bench VEL
Gießler, M.; Rautenberg, P.; Gauterin, F.
2020. 20. Internationales Stuttgarter Symposium : Automobil- und Motorentechnikg. Hrsg.: M. Bargende, 159–172, Springer. doi:10.1007/978-3-658-30995-4_19
Gießler, M.; Rautenberg, P.; Gauterin, F.
2020. 20. Internationales Stuttgarter Symposium : Automobil- und Motorentechnikg. Hrsg.: M. Bargende, 159–172, Springer. doi:10.1007/978-3-658-30995-4_19