
Dual-Bayes Localization Filter Extension for safeguarding in case of uncertain Direction Signals
-
Autor:
Wohlgemuth, T.
-
Quelle:
Sensors 2018, 18, 3539.
MDPI AG, Basel, Schweiz
DOI: 10.3390/s18103539 - Datum: 19.10.2018
-
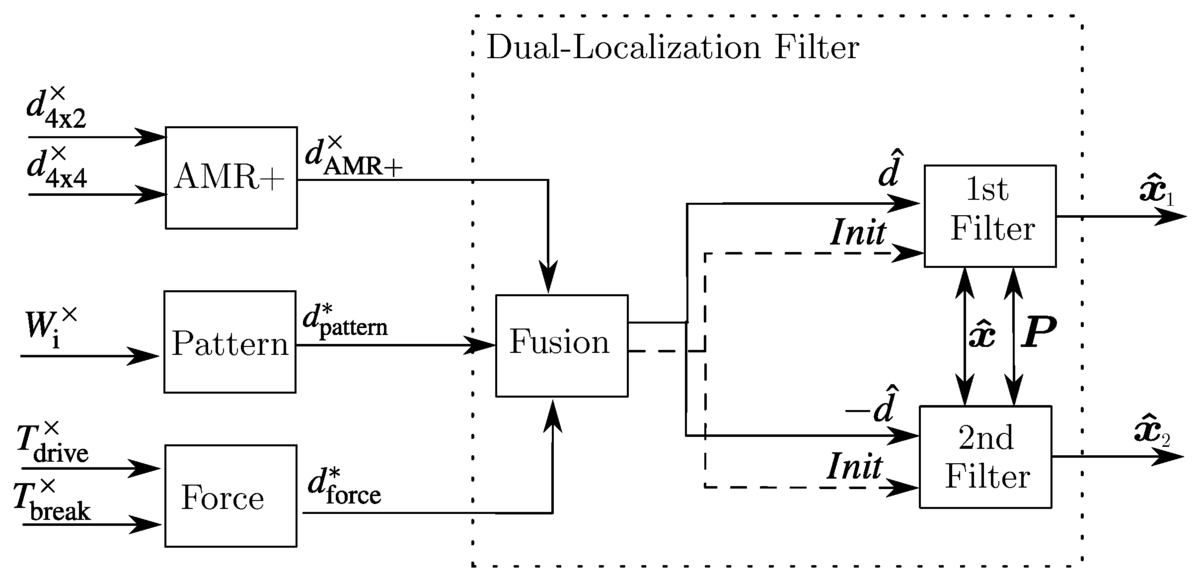
In order to run a localization filter for parking systems in real time, the directional information must be directly available when a distance measurement of the wheel speed sensor is detected. When the vehicle is launching, the wheel speed sensors may already detect distance measurement in the form of Delta-Wheel-Pulse-Counts (DWPCs) without having defined a rolling direction. This phenomenon is particularly problematic during parking maneuvers, where many small correction strokes are made. If a localization filter is used for positioning, the restrained DWPCs cannot process in real time. Without directional information in the form of a rolling direction signal, the filter has to ignore the DWPCs or artificially stop until a rolling direction signal is present. For this reason, methods for earlier estimation of the rolling direction based on the pattern of the incoming DWPCs and based on the force equilibrium have been presented. Since the new methods still have their weaknesses and a wrong estimation of the rolling direction can occur, an extension of a so-called Dual-Localization filter approach is presented. The Dual-Localization filter uses two localization filters and an intelligent initialization logic that ensures that both filters move in opposite directions at launching. The primary localization filter uses the estimated and the secondary one the opposite direction. As soon as a valid rolling direction signal is present, an initialization logic is used to decide which localization filter has previously moved in the true direction. The localization filter that has moved in the wrong direction is initialized with the states and covariances of the other localization filter. This extension allows for a fast and real-time capability to be achieved, and the accumulated velocity error can be dramatically reduced.