
Constrained Control Allocation Improving Fault Tolerance of a Four Wheel Independently Driven Articulated Vehicle
-
Autor:
Schütz, L.
-
Quelle:
IEEE Open Journal of Intelligent Transportation Systems
(Early Access) - Datum: 03.03.2023
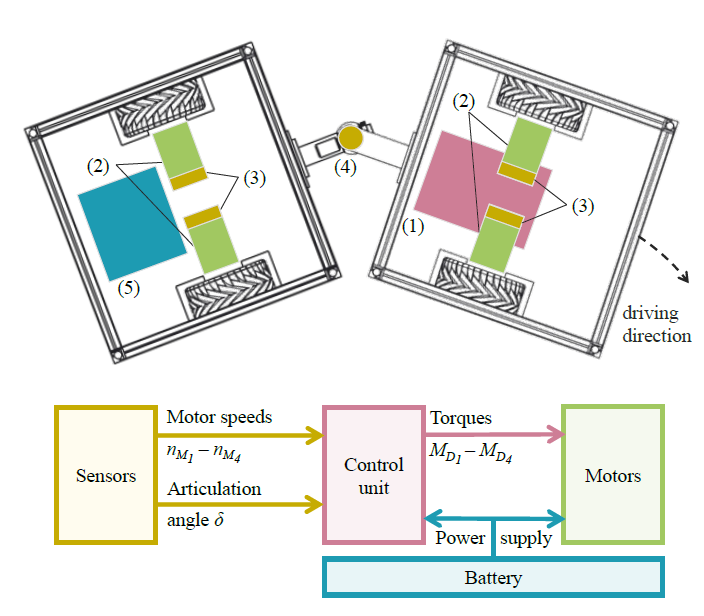
Abstract
In articulated vehicles steering is accomplished by adjusting the articulation angle. Commonly a steering actuator is used to pivot the two vehicle sections. This actuator can be dispensed with if the pivoting is controlled by selective distribution of the drive torques to the individually driven wheels instead. Since steering is a safety-critical function, it must be ensured even if one of the drive motors fails. For this purpose, we propose a control method for a fault-tolerant four wheel independently driven articulated vehicle. The control method was developed and tested in a simulation environment and validated on a 1:5 scale demonstrator vehicle. The proposed method with constrained control allocation maintains the desired velocity and articulation angle by distributing the driving torques to the four wheels considering the current actuator limits. Both the simulation and the vehicle tests show that the control method meets the control objectives even when a sudden actuator limit occurs during critical driving scenarios like cornering. Thus, the vehicle can keep its maneuverability in the event of a detected failure of a drive motor. Together with reliable failure detection, the proposed approach provides a basis for further development towards innovative fault-tolerant electric articulated vehicles that meet the requirements of functional safety.