
Machine-Learning-Based Fault Detection in Electric Vehicle Powertrains Using a Digital Twin
-
Autor:
Dettinger, F.; Jazdi, N.; Weyrich.M.; Brandl, L.; Reuss, H.-C.; Pecha, U.; Parspour, N.;
Li, S.; Frey, M.; Gauterin, F.; Nägele, A.-T.; Lüntzel, V. A.; Sax, E. -
Quelle:
SAE Technical Paper
2023-01-1214, 2023
doi:10.4271/2023-01-1214 - Datum: 26.06.2023
Abstract
Electric Vehicles are subject to effects that lead to more or less rapid degradation of functions. This can cause hazards for the drivers and uninvolved road participants. For this reason, they must be detected and mitigated, to maintain the vehicle function even in critical situations until a safe operating mode can be established.
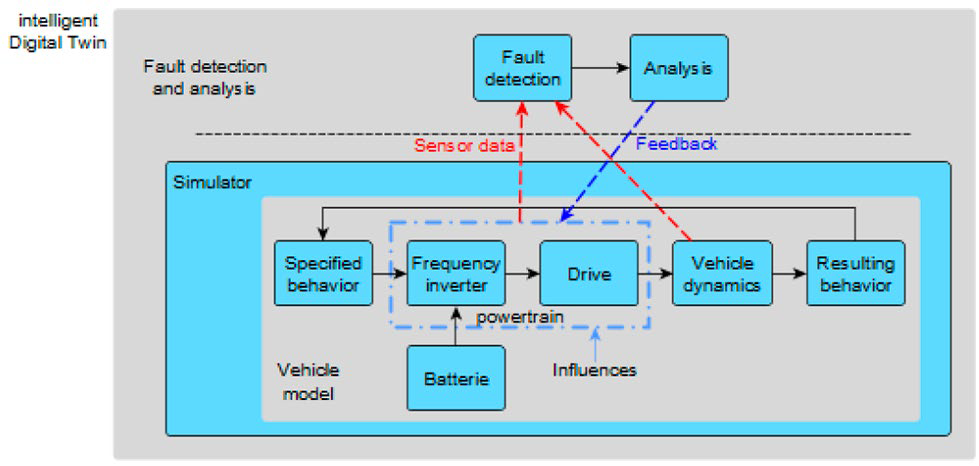
This publication presents an intelligent digital twin, located in the edge and connected with an electric vehicle via 5G. That can improve the operation of electrified vehicles by enabling the online detection of abnormal situations in the electrified powertrain and vehicle dynamics. Its core component is the fault detection system, which is implemented based on a 1-Nearest Neighbor algorithm. It is initially trained on synthetic data, generated in CarMaker for real-world powertrain issues such as demagnetization and open-/short-switch failures, using detailed mathematical models. In this context 139 simulations were performed with three different velocities (10 km/h, 18 km/h and unlimited) in sum. Thereby 36 variables were recorded in each simulation. This leads to a total number of 953,534 data points. Out of this, 77 % are used for training and 23% are used for validation. Based on the detected fault, a self-healing strategy is applied. Therefore, a look-up table, also located in the edge, is used to limit the motor torque to predefined levels.
During the evaluation two major results are shown. The fault is well detected after a short detection time, but situations like accelerating or braking shows a similar signal behavior like the considered faults, leading to false positives. The effect of a fault can be mitigated by an online self-healing approach located in the edge in nearly real time. For connected vehicles, it seems realistic to apply an online digital twin enabling the fault detection and mitigation to the edge.