
Energieoptimale Fahrwerkskinematik für radindividuelle Lenkung mit erhöhtem Lenkwinkel
- Typ:Masterarbeit
- Datum:abgeschlossen
- Betreuung:
- Links:Text als PDF
Aufgabe:
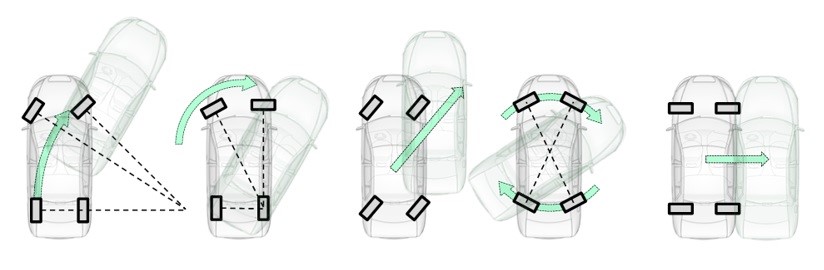
In dem vom Bundesministerium für Bildung und Forschung (BMBF) geförderten Projekt „OmniSteer“ werden neue elektrische Mobilitätskonzepte mit einem hohen Automatisierungsgrad und einer intelligenten Vernetzung der Fahrzeuge erforscht. Die urbane Manövrierfähigkeit von Fahrzeugen wird mit individuell steuerbaren Einzelrädern und einem auto¬ma¬tischen Lenk¬system er¬höht. Dabei werden höchste Ansprüche an das Fahrwerk gestellt, welches an jedem Rad einen Lenk¬winkel von 90° in beide Richtungen erlauben soll. Dies wird durch den Einsatz von rad¬selektiven Elektroantrieben ermöglicht. Aufgrund einer radindividuellen Lenkung muss jedes Rad mit einem Aktuator für die Lenkbewegung versehen werden. Der Verzicht auf eine konventionelle Spurstange im Lenksystem stellt dabei einen hohen Anspruch an die Leistung des Lenkaktuators. Es bestehen viele Möglichkeiten, den Lenkmomentbedarf bzw. Energieverbrauch zu reduzieren, wobei die Kenngrößen des Fahrwerks (z.B. Lenkrollhalbmesser, Nachlauf) eine wesentliche Rolle spielen. Ziel der Abschlussarbeit ist, durch eine Optimierung der Fahrwerkskinematik den Lenkmomentbedarf bei den definierten Fahrmanövern zu reduzieren.
Die Arbeit gliedert sich in folgende Teilaufgaben:
- Einarbeitung in die Themen OmniSteer, Fahrwerk, Lenkung
- Definition der konventionellen und omnidirektionalen Fahrmanöver
- Herausarbeiten der relevanten Fahrwerkskenngrößen, die beim Lenken einen Einfluss haben.
- Aufstellen einer Zielfunktion zur energieoptimalen Fahrwerkskinematik
- Durchführung der Optimierung in der Simulationsumgebung
- Diskussion der Ergebnisse
Ihr Profil
- Student/in eines ingenieurwissenschaftlichen Studiengangs, z. B. Maschinenbau oder Fahrzeugtechnik
- Gute Kenntnisse in Fahrwerk
- Eigenständiges strukturiertes Arbeiten