
OmniSteer - Elektronisches Längs- und Querführungssystem für automatisierte Fahrmanöver
- Ansprechperson:
- Projektgruppe:
Fahrwerk
- Förderung:
- Projektbeteiligte:
Verbundpartner:
Schaeffler Technologies AG & Co. KG
PARAVAN GmbH
Forschungszentrum Informatik (FZI)
HELLA Aglaia Mobile Vision GmbHAssoziierte Partner:
DEKRA
Custom Interactions UG
Cluster Elektromobilität Süd-West - Starttermin:
01.01.2016
- Endtermin:
31.03.2019
abgeschlossen
Inhalte und Ziele
In dem vom Bundesministerium für Bildung und Forschung (BMBF) geförderten Projekt „OmniSteer“ werden neue elektrische Mobilitätskonzepte mit einem hohen Automatisierungsgrad und einer intelligenten Vernetzung der Fahrzeuge erforscht. Die urbane Manövrierfähigkeit von Fahrzeugen wird mit individuell steuerbaren Einzelrädern und einem automatischen Lenksystem erhöht. Dabei werden höchste Ansprüche an das Fahrwerk gestellt, welches an jedem Rad einen Lenkwinkel von 90° in beide Richtungen erlauben soll. Dies wird durch den Einsatz von radselektiven E-Antrieben ermöglicht. Omnidirektionale Fahrmanöver sind somit durchführbar. Das Vorhaben wird vom BMBF über eine Laufzeit von drei Jahren mit rund 3,4 Mio. Euro gefördert. Das Projekt startete zum Januar 2016.
„Die zunehmende Elektrifizierung und Automatisierung von Fahrzeugen ermöglicht es, dem Nutzer neuartige Fahrfunktionen anzubieten“, erklären die Projektleiter Dr. Marcel Mayer von der Firma Schaeffler und Dr. Michael Frey vom Karlsruher Institut für Technologie (KIT). „Der Mehrwert von Elektroantrieben gegenüber Verbrennungsmaschinen tritt deutlich hervor, da wir elektrische Antriebe direkt in jedes Rad integrieren können.“
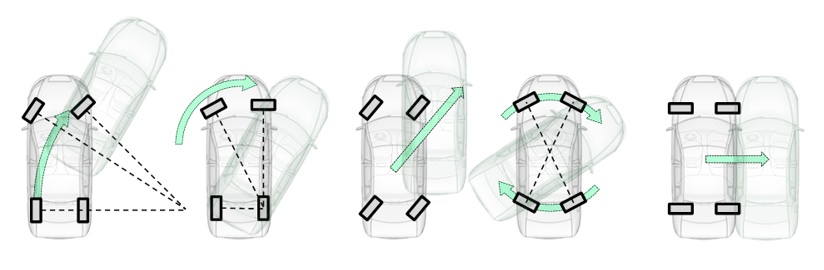
Zusammen mit neuartigen Radaufhängungen, welche größere Lenkeinschläge an der Vorder- und Hinterachse erlauben, werden passende Abstands- und Spurassistenten entwickelt (hochintegriertes Längs- und Querführungssystem), welche die Manövrierfähigkeit deutlich verbessern. „Je nach Situation kann nahtlos zwischen Vorderrad-, Hinterrad- und Allradlenkung gewechselt werden“, sagt Mayer, der die Arbeitsgruppe Automatisiertes Fahren bei Schaeffler leitet und innerhalb der Forschungskooperation SHARE am KIT (Schaeffler Hub for Automotive Research in E-Mobility) forscht. Fahrmanöver in beengten Situationen werden durch OmniSteer zeitlich wie auch energetisch effizienter. Etwa beim Abbiegen und Spurwechsel im Stau oder vor Baustellen, wodurch die Fahrspuren besser ausgenutzt werden können. Oder im Zustelldienst, wo sogar kontinuierlich aus der Fahrt heraus ein Einparken quer zur Fahrtrichtung möglich wird und somit nicht nur kleinste Parklücken effizient genutzt werden, sondern auch die Fahrspur für den fließenden Verkehr schnell wieder freigegeben wird. „Somit steigern diese Fahrfunktionen direkt Sicherheit, Komfort und Energieeffizienz sowie langfristig auch Raumnutzung und Verkehrsfluss in Städten“, so Frey vom Institut für Fahrzeugsystemtechnik des KIT.
Innerhalb von OmniSteer entsteht am KIT ein verkleinertes Demonstrationsfahrzeug, dessen Längs- und Querführungssystem orthogonale, mehrdirektionale und nichtlineare Fahr- und Lenkmanöver ausführen kann. Diese drei Eigenschaften ermöglichen innovative Fahrfunktionen und somit das Ausschöpfen des vollen Potentials von Automatisierung in elektrisch angetriebenen Fahrzeugen. Das Fahrzeug wird mit Sensoren das Umfeld erkennen, den bestmöglichen Fahrweg errechnen und dann komplexe Manöver eigenständig ausführen können. Durch eine eigens entwickelte Anzeige- und Bedieneinheit wird der Fahrer die Fahrfunktionen nachvollziehen, auswählen und bei Bedarf eingreifen können. Das FZI Forschungszentrum Informatik bringt dafür Manöver- und Trajektorienplanungsverfahren in das Vorhaben ein, welche die bestmögliche Fahrwerkskonfiguration situativ abhängig auswählen.
Mit dem Verbundprojekt OmniSteer startet ein weiteres gemeinsames öffentlich gefördertes Projekt im Rahmen der Forschungskooperation SHARE am KIT zwischen der Schaeffler Technologies AG & Co. KG, dem KIT und weiteren Verbundpartnern.