
Usage of the Cornering Stiffness for an Adaptive Rear Wheel Steering Feedforward Control
- Autor:
-
Quelle:
IEEE Transactions on Vehicular Technology, Institute of Electrical and Electronics Engineers (IEEE); New York; USA
IEEE Transactions on Vehicular Technology On page(s): 1-13 Print ISSN: 0018-9545
- Datum: 29.11.2018
-
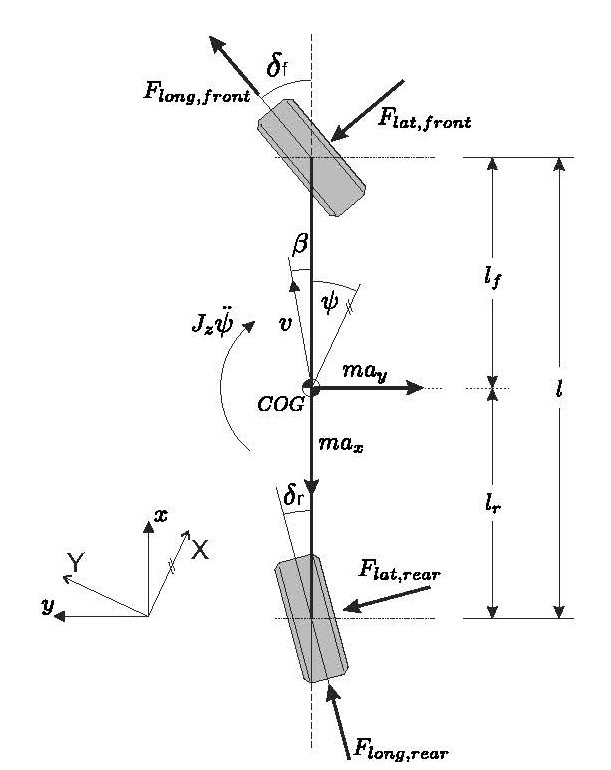
This paper presents the usage of additional tire information in the form of cornering stiffness to enhance vehicle handling and stability with an adaptive rear-wheel steering control (RWS). The influence of varying cornering stiffness on driving behavior is dicussed in advance with a singletrack model. On the basis of an enhanced single-track model, a rear-wheel steering feedforward control is presented with a provided tuning parameter adapting the desired rear axle cornering stiffness for the vehicle. In the following this paper proposes an adaption law that is derived in order to enhance handling performance and safety of a vehicle, taking into account conflicting goals. Finally, simulation results and driving experiments with the adaptive RWS feedforward control are evaluated in both steady state and transient conditions. In order to examine the full potential of the approach, the controller is adapted to a wide spreading of the cornering stiffness. Therefore, identified cornering stiffnesses of winter-, summer- and ultra-high performance tires are used as a basis for the adaption.