
Trajektorienoptimierung mit Kalman Filter
- Typ:Masterarbeit
- Datum:ab sofort
- Betreuung:
- Links:Text als PDF
-
Trajektorienoptimierung mit Kalman Filter
In Kooperation mit der Dr. Ing. h.c. F. Porsche AG arbeitet das Institut für Fahrzeugsystemtechnik an der Entwicklung und Erprobung von Fahrerassistenzsystemen.
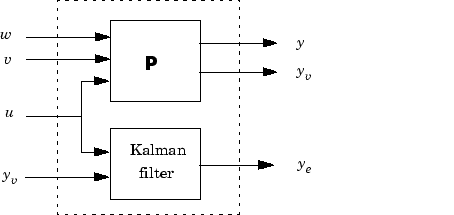
Kalmanfilter werden in technischen Systemen dazu verwendet, um Voraussagen und Korrekturen bezüglich des Verhaltens einzelner Systemparameter zu machen. In dieser Arbeit soll untersucht werden, wie Kalmanfilter zu Ermittlung eines energetisch günstigen Geschwindigkeitsverlaufs verwendet werden können.
Hierzu ist die Einarbeitung in die Thematik der Kalmanfilter mit besonderer Fokussierung auf die Verwendung alternativer Fehlerfunktionen notwendig. Erfolgsversprechende Algorithmen sollen in Matlab implementiert und im Hinblick auf ihre Einsetzbarkeit geprüft werde. Abschließend ist der Vergleich mit einer Lösung der „Dynamischen Programmierung“ aufzustellen.
Die Arbeit gliedert sich in folgende Teilaufgaben:
- Literaturrecherche zu alternativen Fehlerfunktionen und Splineanpassung mit Kalmanfiltern
- Implementierung geeigneter Algorithmen
- Vergleich mit Lösung der dynamischen Programmierung
- Wissenschaftliche Aufbereitung und Dokumentation
Voraussetzungen sind:
- Technisch-naturwissenschaftliches Studium
- Erfahrung in Matlab
- Überdurchschnittliches Interesse am wissenschaftlichen Arbeiten
Bei Interesse bitte eine Bewerbung mit Lebenslauf und Notenliste an:
M.Sc. Stephan Rhode Dipl.-Phys. Felix Bleimund
http://www.fast.kit.edu/lff/1011_3295.php http://www.fast.kit.edu/lff/1011_3113.php
Telefon: 0721 608 4 6428 Telefon: 0721 608 4 1884
Email: stephan.rhode@kit.edu Email: felix.bleimund@kit.edu