
Peak Compensator - Aktive Neutralisierung von extern auf den Antriebsstrang induzierten Belastungsspitzen
- Ansprechperson:
- Förderung:
ZIM - Zentrales Innovationsprogramm Mittelstand,
Bundesministerium für Wirtschaft und Energie - Projektbeteiligte:
- Starttermin:
01.08.2018
- Endtermin:
31.07.2020
Motivation
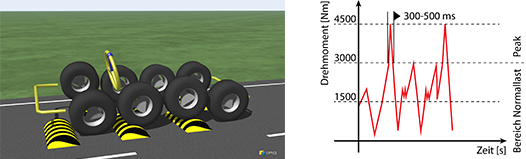
Antriebsstränge von Fahrzeugen werden durch Belastungsspitzen (Peaks) deutlich über ihre Nennlast hinaus beansprucht. Um frühzeitiges Versagen der Bauteile im Leistungsfluss zu verhindern, müssen diese gegen die Spitzenlasten ausreichend dimensioniert werden. Da die Belastungen der Bauteile durch Peaks in Versuchen nur sehr aufwendig zu erfassen sind, basiert der Festigkeitsnachweis im Stand der Technik überwiegend auf rfahrungs- und Sicherheitswerten. Aus der höheren Dimensionierung und meist konservativen Wahl von Sicherheitsbeiwerten resultiert eine erhöhte Masse im Fahrantrieb. Diese führt zu zusätzlichen Produktionskosten und einer erhöhten Trägkeit des Antriebsstrangs, welche sich negativ auf Fahrdynamik, Kraftstoffverbrauch und Emissionen auswirkt.
Ziel des Projektes ist es Drehmomentspitzen zu erkennen, diese von normalen Drehmomentanforderungen zu unterscheiden und eine radnahe Eliminierung durch geeignete Aktoren einzuleiten, bevor die Peaks durch den Antriebsstrang geleitet werden.
Funktionsweise und Aufbau
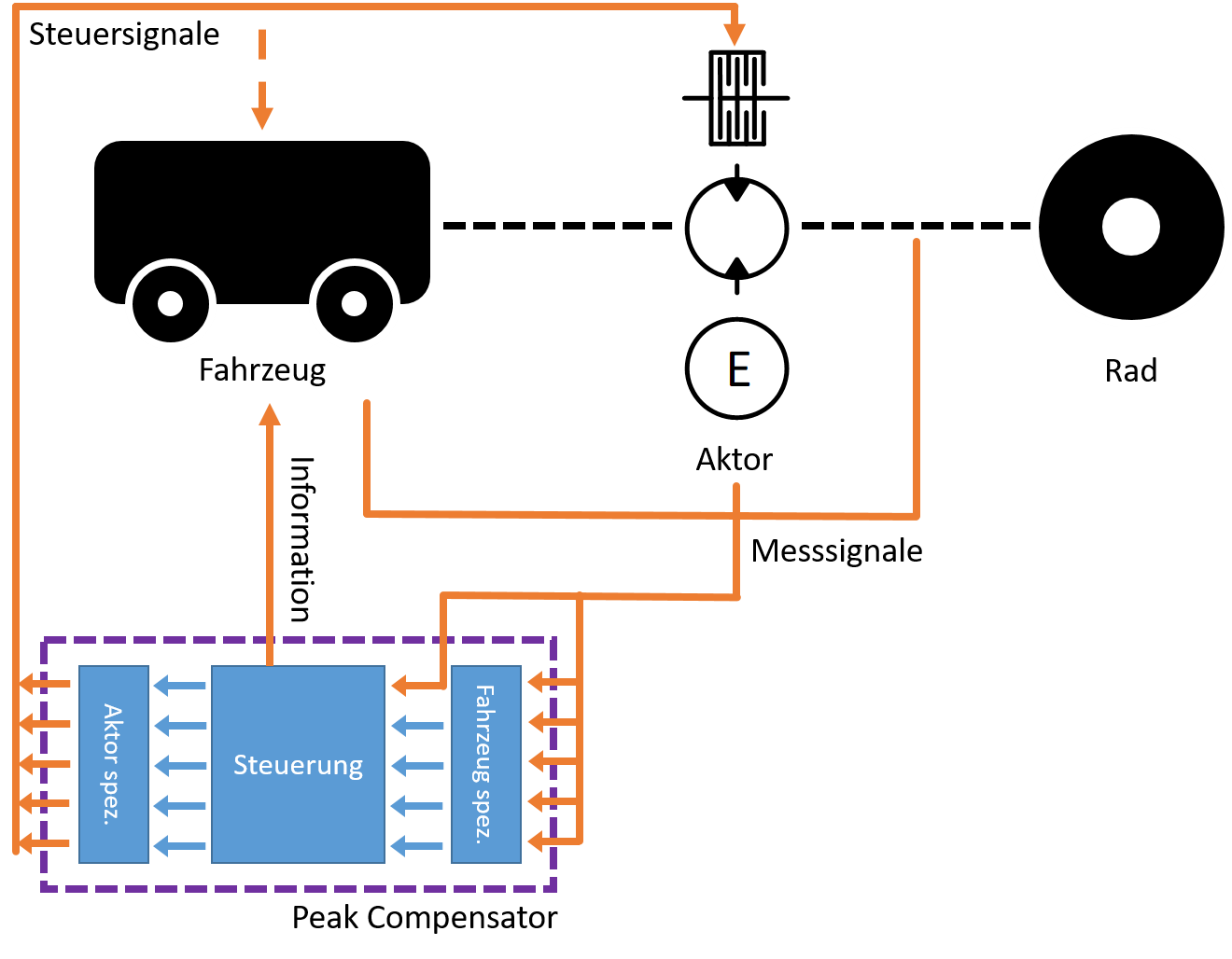
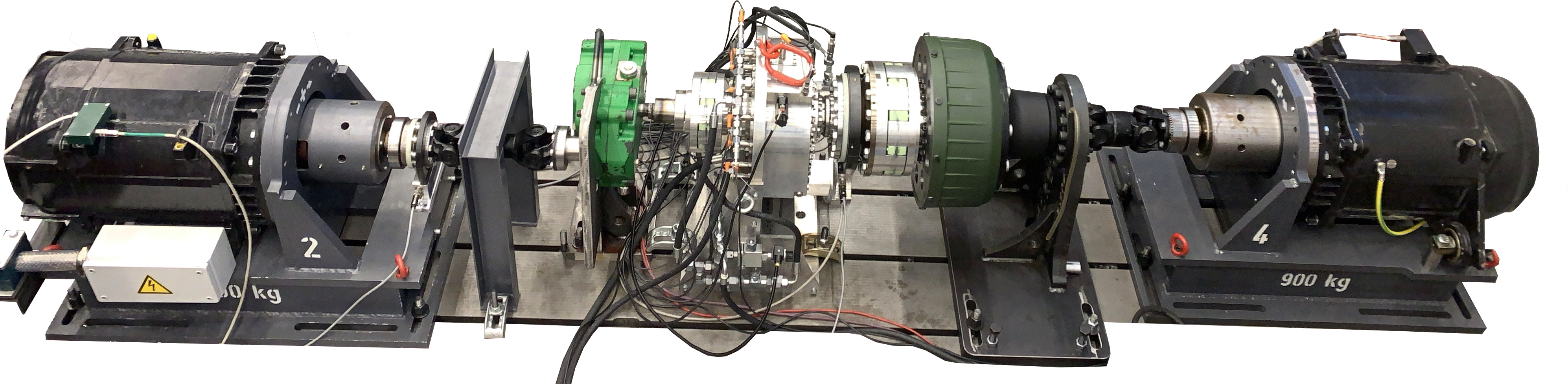
Damit Peaks neutralisiert werden können, müssen diese zunächst anhand von geeigneten Sensoren und Fahrzustandsdaten erkannt werden. Ist ein Peak erkannt, kann durch die Steuerung eine Handlungsstrategie abgeleitet werden. Abhängig vom Fahrzeug und dessen Fahrzustand ist für jedes Rad ein Zielzustand zu ermitteln. Über ein Interface zwischen Steuerung und Aktor wird dann der Zielzustand eingeregelt. Die Erkennung, Verarbeitung und Ansteuerung ist dabei zeitkritisch. Alle Schritte müssen schnell genug ausgeführt werden, damit die Aktoren den Peak rechtzeitig neutralisieren können. Frequenzen von 2 Hz bis 20 Hz, durch Bumper auf der Fahrbahn, liegen dabei im Fokus der Untersuchung. Zudem muss das System in jedem Anwendungsfall und Fahrzeugzustand sicher sein. Bei Steigungsfahrten soll die Steuerung erkannte Peaks so neutralisieren, dass das Fahrzeug nicht an Dynamik verliert und zum Stillstand kommt. Insbesondere das Durchfahren von steilen Rampen, wie sie häufig bei Geländefahrten vorkommen, stellt hier eine große Herausforderung dar. Um möglichst früh verschiedene Strategien in unterschiedlichen Fahrsituationen untersuchen zu können, kommt ein XiL-Ansatz zum Einsatz. Dabei wird ein Fahrzeug samt Fahrsituation simuliert, dessen Steuerung einen realen Aktor auf dem Prüfstand ansteuert. Der Aktor ist dabei zwischen zwei E-Maschinen eingespannt, die von der Simulation gesteuert für den Aktor realitätsnahe Einsatzbedingungen erzeugen.

Veröffentlichungen
-
Auflösung von geländeseitig verursachten Antriebsverspannungen bei hochmobilen Arbeitsmaschinen
Herr, S.; Müller, W.; Müller, J.; Eckloff, U.
2020. 11. Kolloquium Mobilhydraulik, Karlsruhe, 10. September 2020. Hrsg.: M. Geimer, 43–54, KIT Scientific Publishing