Aktuelles 2026
Vorstellung des TRFMU bei der chassis.tech plus 2026
Am 24.06.2026 hat Timon Schlögl beim 17. Internationalen Münchner Fahrwerk-Symposium (chassis.tech plus 2026) einen neu entwickelten Messanhänger vorgestellt, der im Rahmen des Projekts "AI-Based Vehicle Performance and Road Condition Prediction" aufgebaut wurde.
Der auch als "Tire Road Friction Measurement Unit" bezeichnete Anhänger verfügt über eine Straßenzulassung und erlaubt die Messung des Kraftschlussverhaltens zwischen Reifen und Fahrbahn auf den verschiedensten Straßenoberflächen innerhalb Deutschlands. In Kombination mit dem mit weiterer Sensorik ausgerüsteten Zugfahrzeug dienen die gewonnenen Daten als Trainingsgrundlage für ein KI-System, das auf Basis von Kamera- und LIDAR-Daten das Kraftschlusspotenzial auf dem vorausliegenden Streckenabschnitt prädiziert.
Bereits während der anschließenden Diskussion und den Pausengesprächen zeichnete sich ein großes Interesse ab, sodass bereits erste weiterführende Austausche mit Partnern aus Forschung und Industrie vereinbart wurden.

Modulares Fahrzeugkonzept U‑Shift II vorgestellt
Mitarbeitende des FAST haben zusammen mit anderen Forschenden aus Baden-Württemberg mit U‑Shift II ein fahrerloses, modulares Fahrzeugkonzept weiterentwickelt: Eine autonome Plattform kann je nach Bedarf unterschiedliche Kapseln aufnehmen – etwa für den Personentransport, Lieferdienste oder mobile Services. So lässt sich ein Fahrzeug flexibel für mehrere Einsätze nutzen.
Das Prototypenfahrzeug wurde beim Abschlussevent zum Projekt am 18. Juni 2026 am KIT Campus Ost vorgestellt. Ziel war es, Mobilität effizienter und nachhaltiger zu gestalten. Kern des Systems ist ein autonomes „Driveboard“, das die Kapseln selbstständig aufnimmt und andockt.
Am Projekt beteiligt waren das FAST und das ITIV des KIT, das DLR, das Institut für Mess-, Regel- und Mikrotechnik der Universität Ulm und das FKFS. Das Land Baden-Württemberg förderte U‑Shift II mit insgesamt 10 Millionen Euro.
Das FAST war im Rahmen des Projekts für die Entwicklung bzw. den Aufbau des Fahrwerks des Driveboards verantwortlich und hat hierbei auch die für den automatisierten Kapselwechsel notwendigen Hubmechanismus integriert. Zusätzlich wurde ein patentiertes Lenkgetriebe entwickelt, welches sowohl einen gleichsinnigen als auch einen gegensinnigen Radeinschlag erlaubt und damit eine erhöhte Manövrierfähigkeit ermöglicht. Zusätzlich wurde beim Fahrwerk eine additiv gefertigte Variante entwickelt, welche Stoff-, energie-, und informationsführenden Leitungen innerhalb der Lenker enthält und somit mit weniger Materialaufwand umgesetzt werden kann.
Ausführliche Informationen:
Heute Shuttle, morgen Lieferfahrzeug: Ein Fahrzeug, viele Funktionen | KIT
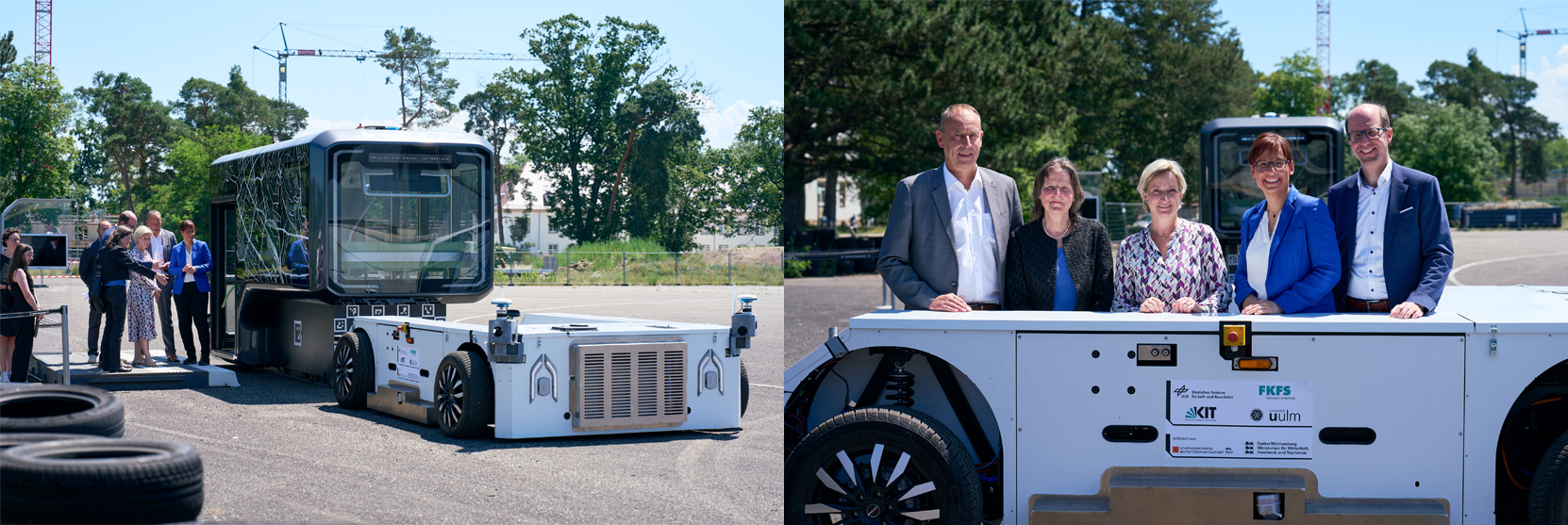
(Ministerium für Wirtschaft, Handwerk und Tourismus Baden-Württemberg), Prof. Meike Jipp (DLR), Prof. Michael Buchholz (Universität Ulm).
Erfolgreiche Meilensteinpräsentation im Projekt „SimVorbeifahrt II“
Am 21. Mai 2026 präsentierte das Projektteam die bislang erzielten Ergebnisse Vertretern aus der Industrie. Im Rahmen des Projekts arbeiten Forschende des Lehrstuhls für Thermodynamik mobiler Energiewandlungssysteme der RWTH Aachen sowie der KIT-Institute für Produktentwicklung und für Fahrzeugsystemtechnik gemeinsam an der Entwicklung eines Methodenleitfadens zur Simulation von Geräuschemissionen bei beschleunigten Vorbeifahrten.
Ziel des Vorhabens ist es, Simulationsverfahren mit experimentellen Geräuschmessungen an einem Reifenprüfstand zu verknüpfen. Auf diese Weise soll das Vorbeifahrgeräusch bereits in einer frühen Phase der Fahrzeugentwicklung mit reduziertem Aufwand valide bewertet werden können.
Im Rahmen des Meilensteintreffens am Institut für Fahrzeugsystemtechnik des KIT wurden die Industriepartner über den aktuellen Stand der Vorbereitungen für Fahrzeug- und Reifenprüfstandsmessungen informiert. Grundlage bildeten unter anderem erste Simulationsergebnisse. Der fachliche Austausch wurde durch Besichtigungen des Akustik-Rollenprüfstands sowie des „Großen Reifen-Innentrommel-Prüfstands“ weiter vertieft.
Die Industrievertreter bewerteten den bisherigen Projektfortschritt durchweg positiv. Das Treffen konnte somit erfolgreich abgeschlossen werden; ein Folgetermin zur weiteren Abstimmung wurde bereits vereinbart.

Promotionsprüfung Muhammed Alhanouti M.Sc.
16.04.2026: Der Institutsteil Fahrzeugtechnik gratuliert Herrn Muhammed Alhanouti M.Sc. zur bestandenen Promotionsprüfung.

Best Paper Award für Veröffentlichung aus dem FAST
Eine Veröffentlichung aus dem Institut für Fahrzeugsystemtechnik (FAST), Institutsteil Fahrzeugtechnik am Karlsruher Institut für Technologie (KIT) wurde mit dem Best Paper Award ausgezeichnet. Stefan Schläfle, Hans-Joachim Unrau und Frank Gauterin erhielten die Auszeichnung für den Beitrag „Influence of Load Condition, Tire Type, and Ambient Temperature on the Emission of Tire–Road Particulate Matter“, der in atmosphere (MDPI) veröffentlicht wurde.
Die Arbeit beschäftigt sich mit der Partikel-Emission aus dem Kontakt zwischen Reifen und Fahrbahn unter verschiedenen Last-, Reifen- und Temperaturbedingungen. Die Ergebnisse liefern wertvolle Erkenntnisse zur Charakterisierung und Quantifizierung von Nicht-Verbrennungs-Emissionen – einem zentralen Thema für zukünftige Emissions- und Umweltanalysen.
Der atmosphere Best Paper Award würdigt jährlich herausragende Publikationen mit hoher wissenschaftlicher Qualität, Bedeutung und Einfluss. Die Auswahl erfolgt durch ein internationales Preis-Komitee auf Basis von Originalität, wissenschaftlicher Leistung und Relevanz des Beitrags. Die Auszeichnung unterstreicht die exzellente Forschungsarbeit am FAST und deren Beitrag zur Weiterentwicklung moderner Fahrzeugsysteme.
Wir gratulieren Stefan Schläfle, Hans-Joachim Unrau und Frank Gauterin herzlich zu dieser internationalen Anerkennung!
![]()